
57-LSTM
长短期记忆网络
1.目录
2.长短期记忆网络:
- 忘记门:将值朝 0 减少
- 输入门:决定是不是忽略掉输入数据
- 输出门:决定是不是使用隐状态
可以说,长短期记忆网络的设计灵感来自于计算机的逻辑门。 长短期记忆网络引入了记忆元(memory cell),或简称为单元(cell)。 有些文献认为记忆元是隐状态的一种特殊类型, 它们与隐状态具有相同的形状,其设计目的是用于记录附加的信息。 为了控制记忆元,我们需要许多门。 其中一个门用来从单元中输出条目,我们将其称为输出门(output gate)。 另外一个门用来决定何时将数据读入单元,我们将其称为输入门(input gate)。 我们还需要一种机制来重置单元的内容,由遗忘门(forget gate)来管理, 这种设计的动机与门控循环单元相同, 能够通过专用机制决定什么时候记忆或忽略隐状态中的输入。 让我们看看这在实践中是如何运作的。
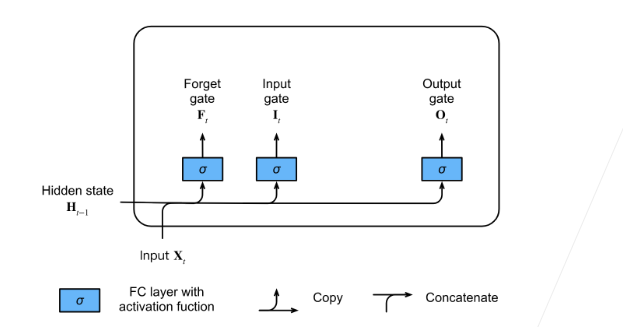
2.1 门:
输入门:
忘记门:
输出门:
这三个门的算式和普通 RNN 计算 Ht 算式相同。
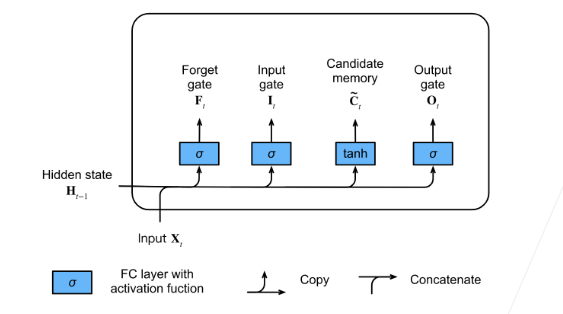
2.2 候选记忆单元
相当于在 ht-1 到 ht 的预测中又加了一层隐藏单元
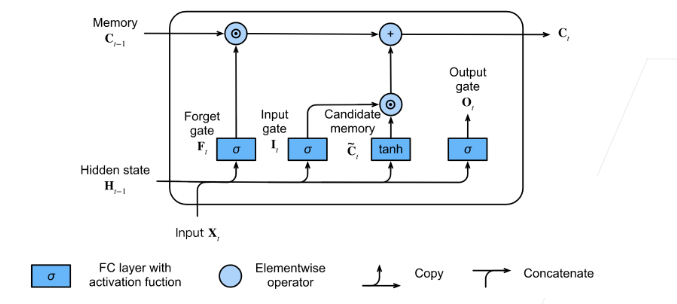
2.2 记忆单元
如果遗忘门始终为(1)且输入门始终为(0), 则过去的记忆元 将随时间被保存并传递到当前时间步。 引入这种设计是为了缓解梯度消失问题, 并更好地捕获序列中的长距离依赖关系。
2.3 隐状态
最后,我们需要定义如何计算隐状态, 这就是输出门发挥作用的地方。 在长短期记忆网络中,它仅仅是记忆元的的门控版本。 这就确保了 Ht 的值始终在区间((-1, 1))内.
只要输出门接近 1,我们就能够有效地将所有记忆信息传递给预测部分, 而对于输出门接近(0),我们只保留记忆元内的所有信息,而不需要更新隐状态。
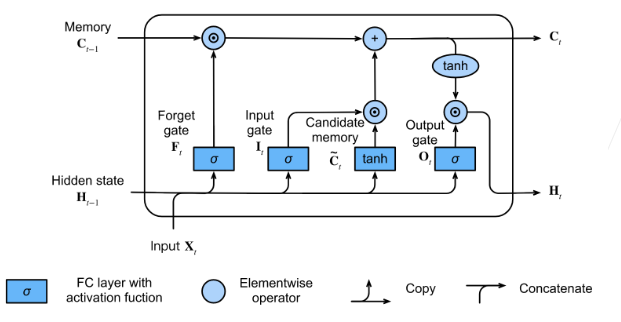
2.4 总结
LSTM 的计算流程:
3.从零实现
加载时光机器数据集
import torch
from torch import nn
from d2l import torch as d2l
batch_size, num_steps = 32, 35
train_iter, vocab = d2l.load_data_time_machine(batch_size, num_steps)
3.1 初始化模型参数
def get_lstm_params(vocab_size, num_hiddens, device):
num_inputs = num_outputs = vocab_size
def normal(shape):
return torch.randn(size=shape, device=device)*0.01
def three():
return (normal((num_inputs, num_hiddens)),
normal((num_hiddens, num_hiddens)),
torch.zeros(num_hiddens, device=device))
W_xi, W_hi, b_i = three() # 输入门参数
W_xf, W_hf, b_f = three() # 遗忘门参数
W_xo, W_ho, b_o = three() # 输出门参数
W_xc, W_hc, b_c = three() # 候选记忆元参数
# 输出层参数
W_hq = normal((num_hiddens, num_outputs))
b_q = torch.zeros(num_outputs, device=device)
# 附加梯度
params = [W_xi, W_hi, b_i, W_xf, W_hf, b_f, W_xo, W_ho, b_o, W_xc, W_hc,
b_c, W_hq, b_q]
for param in params:
param.requires_grad_(True)
return params
3.2 定义模型
在初始化函数中, 长短期记忆网络的隐状态需要返回一个额外的记忆元, 单元的值为 0,形状为(批量大小,隐藏单元数)。 因此,我们得到以下的状态初始化。
def init_lstm_state(batch_size, num_hiddens, device):
return (torch.zeros((batch_size, num_hiddens), device=device),
torch.zeros((batch_size, num_hiddens), device=device))
实际模型的定义与我们前面讨论的一样: 提供三个门和一个额外的记忆元。 请注意,只有隐状态才会传递到输出层, 而记忆元(\mathbf{C}_t)不直接参与输出计算。
def lstm(inputs, state, params):
[W_xi, W_hi, b_i, W_xf, W_hf, b_f, W_xo, W_ho, b_o, W_xc, W_hc, b_c,
W_hq, b_q] = params
(H, C) = state
outputs = []
for X in inputs:
I = torch.sigmoid((X @ W_xi) + (H @ W_hi) + b_i)
F = torch.sigmoid((X @ W_xf) + (H @ W_hf) + b_f)
O = torch.sigmoid((X @ W_xo) + (H @ W_ho) + b_o)
C_tilda = torch.tanh((X @ W_xc) + (H @ W_hc) + b_c)
C = F * C + I * C_tilda
H = O * torch.tanh(C)
Y = (H @ W_hq) + b_q
outputs.append(Y)
return torch.cat(outputs, dim=0), (H, C)
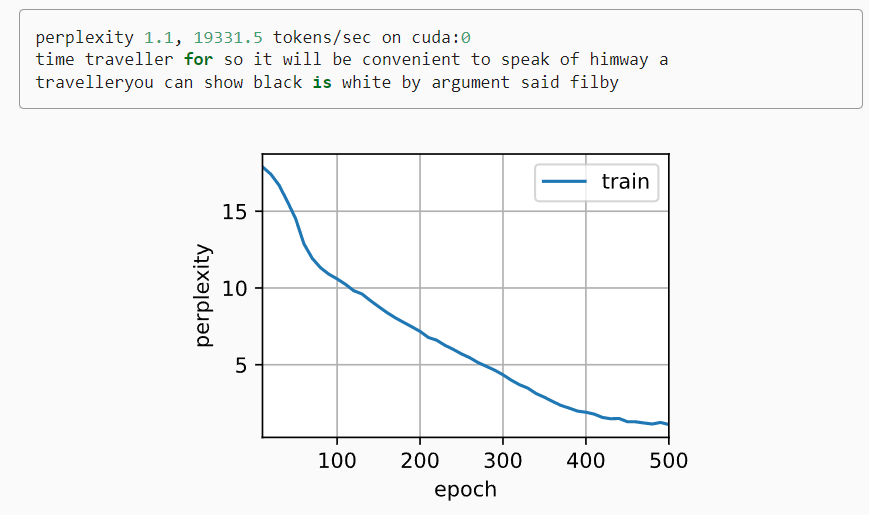
3.3 训练和预测
vocab_size, num_hiddens, device = len(vocab), 256, d2l.try_gpu()
num_epochs, lr = 500, 1
model = d2l.RNNModelScratch(len(vocab), num_hiddens, device, get_lstm_params,
init_lstm_state, lstm)
d2l.train_ch8(model, train_iter, vocab, lr, num_epochs, device)
Q&A
Q1:请问 LSTM 如果不要 C,把公式里的 换成
换成 ,好像可以实现隐藏状态往下传递?
,好像可以实现隐藏状态往下传递?
Q2:I,F,O,C_tilda 的初始化为零?
这些是计算的中间变量,不需要初始化
Q3:如何计算模型占用显存,batch 占用的显存?
取决于框架和库,没法具体算