
Linux 网络 IO 模型
Linux IO 模型
对 Linux 系统而言,所有设备都是文件,其中包括磁盘、内存、网卡、键盘、显示器等等,对所有这些文件的访问都属于 IO。针对所有的 IO 对象,可以将 IO 分成三类:网络 IO、磁盘 IO 和内存 IO。而通常我们说的是前两种。
只有网络 IO 是能够单线程事件循环,文件 IO 暂时只能用线程池来模拟事件循环。
在整个请求过程中,IO 设备数据输入至内核 buffer 需要时间,而从内核 buffer 复制数据至进程 Buffer 也需要时间。因此根据在这两段时间内等待方式的不同,IO 动作可以分为以下五种模式:
- 阻塞 IO (Blocking IO): 发起 IO 操作后阻塞当前线程直到 IO 结束,标准的同步 IO,如默认行为的 posix read 和 write。
- 非阻塞 IO (Non-Blocking IO): 发起 IO 操作后不阻塞,用户可阻塞等待多个 IO 操作同时结束。non-blocking 也是一种同步 IO:“批量的同步”。如 linux 下的 poll,select, epoll,BSD 下的 kqueue。
- IO 复用(IO Multiplexing): 发起 IO 操作后不阻塞,用户得递一个回调待 IO 结束后被调用。如 windows 下的 OVERLAPPED + IOCP。linux 的 native AIO 只对文件有效。
- 信号驱动的 IO (Signal Driven IO)
- 异步 IO (Asynchrnous IO)
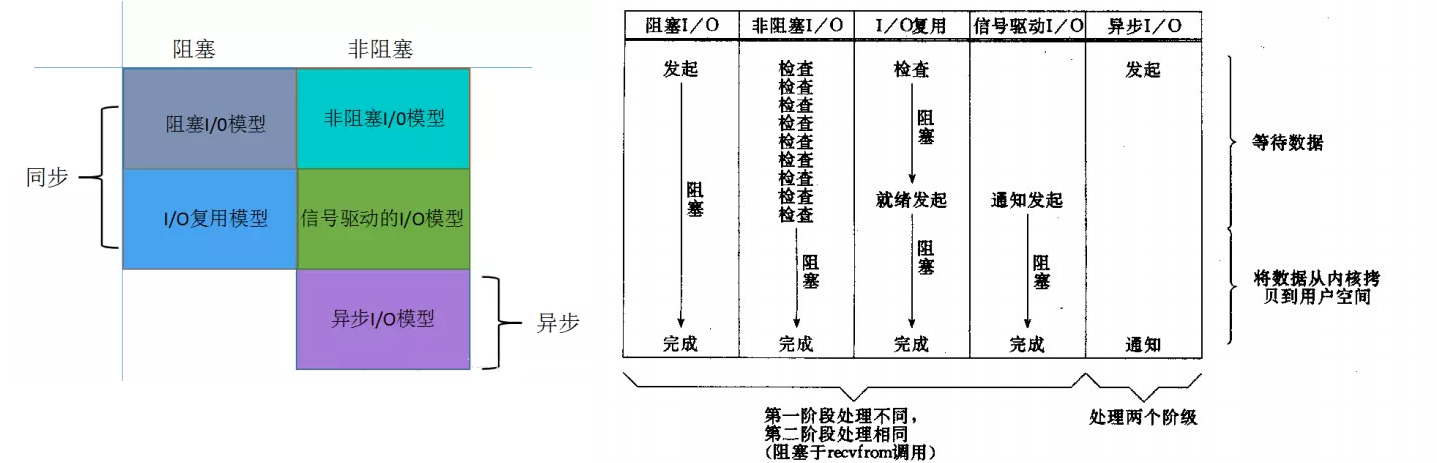
前四个模型之间的主要区别是第一阶段,四个模型的第二阶段是一样的,过程受阻在调用 recvfrom 当数据从内核拷贝到用户缓冲区。然而,异步 IO 处理两个阶段,与前四个不同。
linux 一般使用 non-blocking IO 提高 IO 并发度。当 IO 并发度很低时,non-blocking IO 不一定比 blocking IO 更高效,因为后者完全由内核负责,而 read/write 这类系统调用已高度优化,效率显然高于一般得多个线程协作的 non-blocking IO。但当 IO 并发度愈发提高时,blocking IO 阻塞一个线程的弊端便显露出来:内核得不停地在线程间切换才能完成有效的工作,一个 cpu core 上可能只做了一点点事情,就马上又换成了另一个线程,cpu cache 没得到充分利用,另外大量的线程会使得依赖 thread-local 加速的代码性能明显下降,如 tcmalloc,一旦 malloc 变慢,程序整体性能往往也会随之下降。而 non-blocking IO 一般由少量 event dispatching 线程和一些运行用户逻辑的 worker 线程组成,这些线程往往会被复用(换句话说调度工作转移到了用户态),event dispatching 和 worker 可以同时在不同的核运行(流水线化),内核不用频繁的切换就能完成有效的工作。线程总量也不用很多,所以对 thread-local 的使用也比较充分。这时候 non-blocking IO 就往往比 blocking IO 快了。不过 non-blocking IO 也有自己的问题,它需要调用更多系统调用,比如 epoll_ctl,由于 epoll 实现为一棵红黑树,epoll_ctl 并不是一个很快的操作,特别在多核环境下,依赖 epoll_ctl 的实现往往会面临棘手的扩展性问题。non-blocking 需要更大的缓冲,否则就会触发更多的事件而影响效率。non-blocking 还得解决不少多线程问题,代码比 blocking 复杂很多。
阻塞 IO (Blocking IO)
当用户进程调用了 recvfrom 这个系统调用,内核就开始了 IO 的第一个阶段:等待数据准备。对于 network io 来说,很多时候数据在一开始还没有到达(比如,还没有收到一个完整的 UDP 包),这个时候内核就要等待足够的数据到来。而在用户进程这边,整个进程会被阻塞。当内核一直等到数据准备好了,它就会将数据从内核中拷贝到用户内存,然后内核返回结果,用户进程才解除 block 的状态,重新运行起来。所以,blocking IO 的特点就是在 IO 执行的两个阶段都被 block 了。(整个过程一直是阻塞的)


非阻塞 IO (Non-Blocking IO)
linux 下,可以通过设置 socket 使其变为 non-blocking。当对一个 non-blocking socket 执行读操作时,流程是如下图所示:

当用户进程调用 recvfrom 时,系统不会阻塞用户进程,而是立刻返回一个 ewouldblock 错误,从用户进程角度讲,并不需要等待,而是马上就得到了一个结果(这个结果就是 ewouldblock)。用户进程判断标志是 ewouldblock 时,就知道数据还没准备好,于是它就可以去做其他的事了,于是它可以再次发送 recvfrom,一旦内核中的数据准备好了。并且又再次收到了用户进程的 system call,那么它马上就将数据拷贝到了用户内存,然后返回。当一个应用程序在一个循环里对一个非阻塞调用 recvfrom,我们称为轮询。应用程序不断轮询内核,看看是否已经准备好了某些操作。这通常是浪费 CPU 时间。
IO 复用(IO Multiplexing)
我们都知道,select/epoll 的好处就在于单个 process 就可以同时处理多个网络连接的 IO。它的基本原理就是 select/epoll 这个 function 会不断的轮询所负责的所有 socket,当某个 socket 有数据到达了,就通知用户进程。它的流程如图:

Linux 提供 select/epoll,进程通过将一个或者多个 fd 传递给 select 或者 poll 系统调用,阻塞在 select 操作上,这样 select/poll 可以帮我们侦测多个 fd 是否处于就绪状态。select/poll 是顺序扫描 fd 是否就绪,而且支持的 fd 数量有限,因此它的使用受到一定的限制。Linux 还提供了一个 epoll 系统调用,epoll 使用基于事件驱动的方式代替顺序扫描,因此性能更高一些。

IO 复用模型具体流程:用户进程调用了 select,那么整个进程会被 block,而同时,内核会“监视”所有 select 负责的 socket,当任何一个 socket 中的数据准备好了,select 就会返回。这个时候用户进程再调用 read 操作,将数据从内核拷贝到用户进程。这个图和 blocking IO 的图其实并没有太大的不同,事实上,还更差一些。因为这里需要使用两个 system call (select 和 recvfrom),而 blocking IO 只调用了一个 system call (recvfrom)。但是,用 select 的优势在于它可以同时处理多个 connection。
信号驱动的 IO (Signal Driven IO)
首先用户进程建立 SIGIO 信号处理程序,并通过系统调用 sigaction 执行一个信号处理函数,这时用户进程便可以做其他的事了,一旦数据准备好,系统便为该进程生成一个 SIGIO 信号,去通知它数据已经准备好了,于是用户进程便调用 recvfrom 把数据从内核拷贝出来,并返回结果。

异步 IO
一般来说,这些函数通过告诉内核启动操作并在整个操作(包括内核的数据到缓冲区的副本)完成时通知我们。这个模型和前面的信号驱动 IO 模型的主要区别是,在信号驱动的 IO 中,内核告诉我们何时可以启动 IO 操作,但是异步 IO 时,内核告诉我们何时 IO 操作完成。
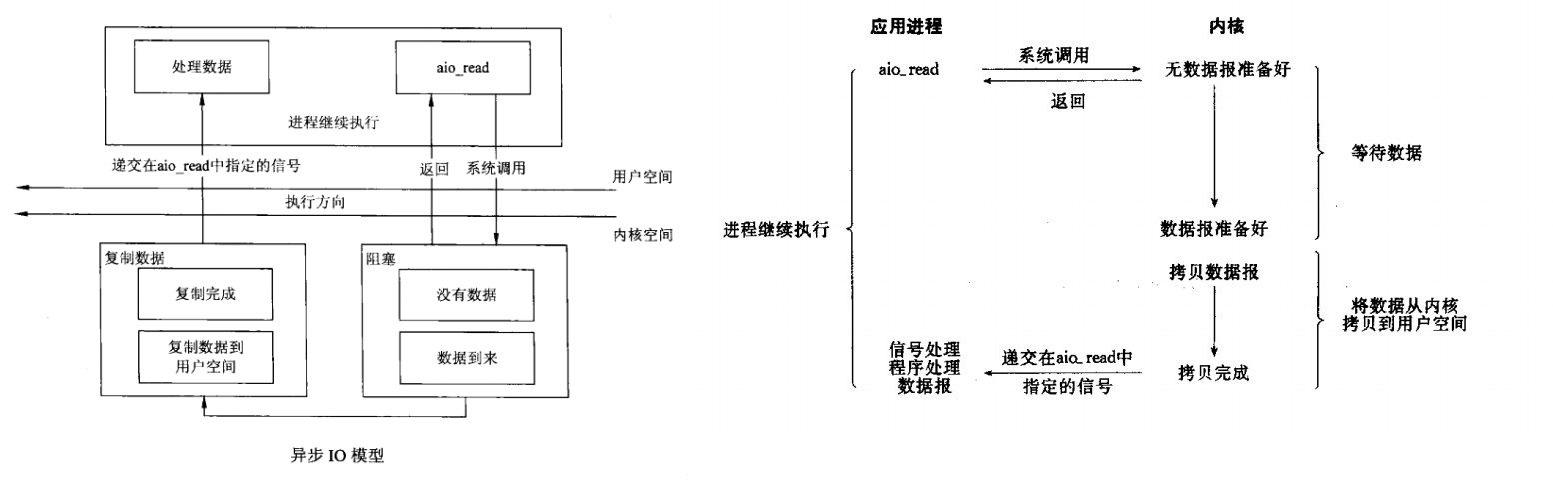
当用户进程向内核发起某个操作后,会立刻得到返回,并把所有的任务都交给内核去完成(包括将数据从内核拷贝到用户自己的缓冲区),内核完成之后,只需返回一个信号告诉用户进程已经完成就可以了。